
Berechnung des Baumbestands aus Lidar-Flugdaten
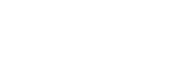
Lidar und andere Fernerkundungsmethoden haben sich zu einem Standardverfahren für die Vermessung moderner Wälder entwickelt. Um dichte Baumkronen zu durchdringen, verwenden Förster Lidar-Daten in Global Mapper Pro, um die Höhenwerte des nackten Bodens zu kartieren und die Walddichte, Kronenbedeckung und Baumhöhen zu visualisieren.
Holzbegehungen für manuelle Messungen kosten Zeit und Arbeitskraft. Die Berechnung eines Baumbestands aus Lidar-Daten aus der Luft sowie anderer Messwerte, wie z. B. der Deckung des Mittelstamms und des freiliegenden Bodens, verschafft den Förstern ein besseres Verständnis der vorhandenen Bestandsdynamik zu einem Bruchteil der Arbeitskosten.
Dieser Arbeitsablauf für die Bauminventur konzentriert sich auf die Berechnung der Bestandszahl, der Höhe der einzelnen Bäume und des Standorts. Sie profitieren von der Verwendung von Lidar-Daten, die eine ausreichend hohe Dichte aufweisen, um die einzelnen Kronen und den darunter liegenden Boden zu erkennen.
Inzwischen gibt es bundesweit bei den Vermessungsämtern kostenfreie Geodaten, die auch Lidar-Daten umfassen. Je nach Qualität und Quelle können diese Daten auch für den hier vorgestellten Einsatzzweck verwendet werden.
Global Mapper kann Baummessungen aus einem Lidar-Datensatz erkennen und extrahieren.
Es gibt zwei Hauptschritte, die beide vom Werkzeug Automatische Punktwolkenanalyse ausgeführt werden:
- Klassifizieren Sie die Punktwolke, um Baumpunkte zu identifizieren.
- Extrahieren Sie die Punktwolke in einzelne Baum-Elemente.
Lidar-Klassifizierung: Identifizierung von Rausch-, Boden- und Vegetationspunkten
Die Punktklassifizierung trennt Vegetations- von Bodenpunkten, ein wesentlicher Schritt bei der Verarbeitung von Walddaten. Klassifizieren Sie zunächst die Rausch- und Bodenpunkte innerhalb der Wolke:
- Das Entfernen von Ausreißern mit dem Werkzeug Rauschklassifizierung führt zu einer insgesamt genaueren Klassifizierung.
- Eine genaue Bodenklassifizierung bietet eine solide Grundlage für die Messung der Baumhöhen bei der Vegetationsklassifizierung.
Als Nächstes müssen Sie die Vegetationspunkte klassifizieren. Für die automatische Klassifizierung stehen zwei Optionen zur Verfügung: Raster und die häufigere Max-Likelihood-Methode.
Klassifizierung der Bäume: Vegetation
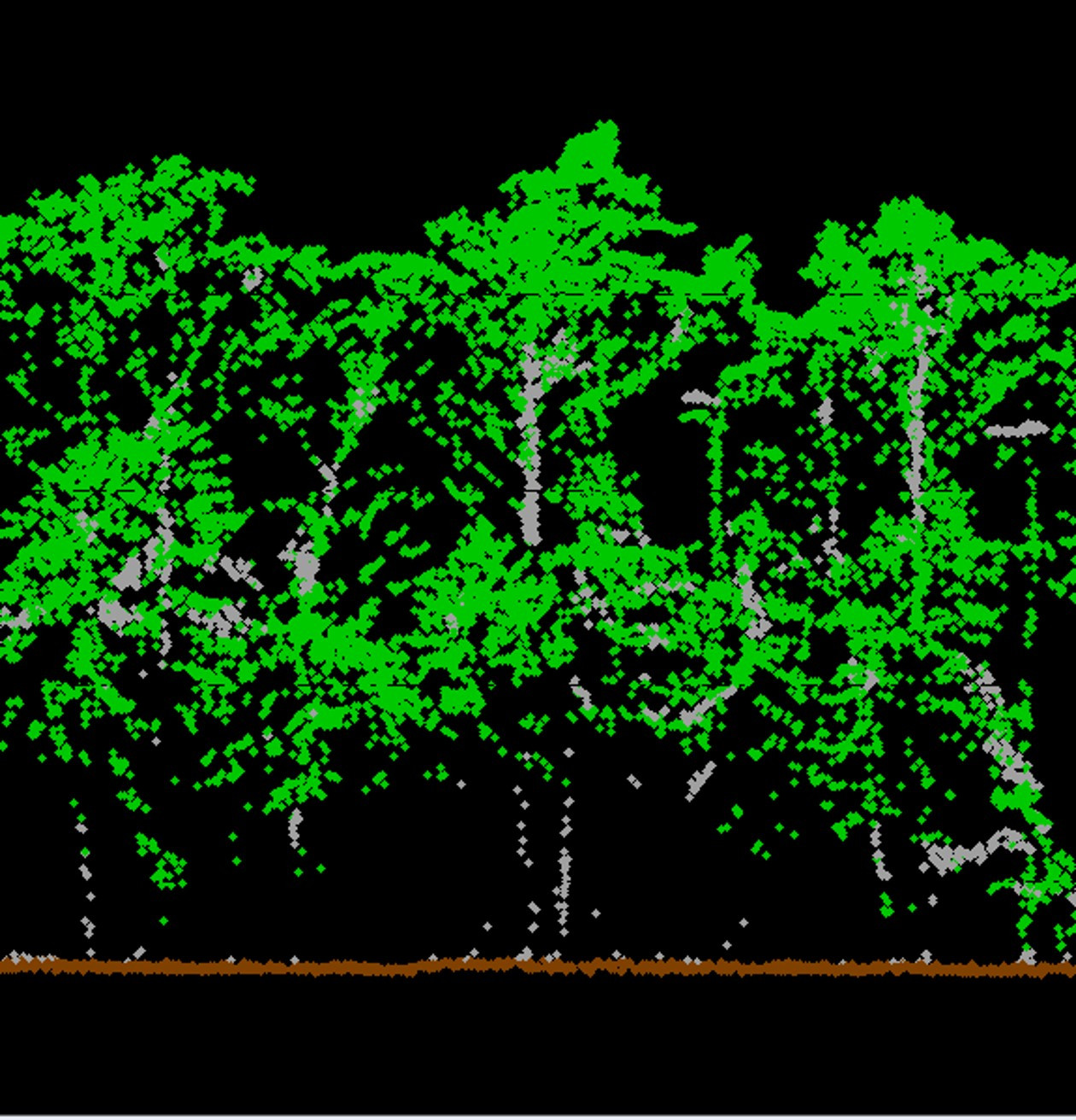
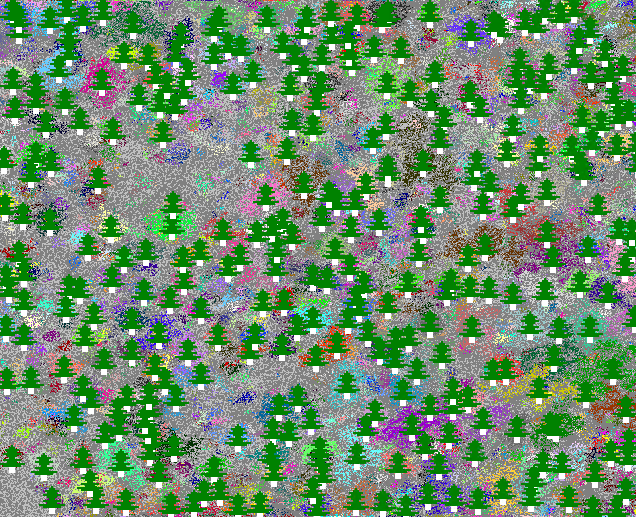
Wie funktioniert die Vegetationsklassifizierung? Das Max-Likelihood-Klassifizierungswerkzeug von Global Mapper verwendet die Segmentierung, um einzelne Bäume im Lidar zu identifizieren. Die Segmentierung ist, einfach ausgedrückt, eine Methode zur Erstellung von Punktclustern, die ein individuelles Element darstellen. Jeder Punktcluster, also jeder erkannte Baum, wird mit einer zufälligen Farbe visualisiert, wie in der Abbildung unten gezeigt.

Segmentierte Baumkronen aus einer Lidar-Sammlung aus der Vogelperspektive.
Einstellungen für die Vegetationsklassifizierung
Mit den Standardeinstellungen können zwar in den meisten Fällen Bäume identifiziert werden, die besten Ergebnisse erzielen Sie jedoch, wenn Sie die Einstellungen des Wergzeuges so anpassen, dass es zu Ihrem Waldtyp und Ihren Daten passt. Wie immer sollten Sie auch die Auflösung berücksichtigen.
Einstellungen zur Vegetation: Für Max Likelihood gibt es nur eine Einstellung speziell für die Klassifizierung von Vegetationspunkten.
- Einzelne Bäume nach Höhe klassifizieren: Aktivieren Sie diese Option, um den Bäumen eine Lidar-Klassifizierung zuzuweisen, die auf der Höhe basiert (niedrige, mittlere oder hohe Vegetation), wie in den "Gemeinsamen Einstellungen" festgelegt. Wenn Sie diese Option nicht aktivieren, wird allen erkannten Vegetationspunkten die mittlere Klassifizierung #4 zugewiesen.
Gemeinsame Einstellungen: Da diese Einstellungen die Waldstruktur und nicht die Lidar-Verarbeitung widerspiegeln, werden diese gemeinsamen Einstellungen bei der Klassifizierung und Extraktion verwendet.
- Baumausdehnung: Diese Einstellungen beziehen sich auf die minimale und maximale Breite (von Kante zu Kante) einer einzelnen Baumkrone. Dies hilft bei der Unterscheidung von Baumgruppen, indem Global Mapper darüber informiert wird, wie klein und wie groß die Baumkronen in diesem Wald voraussichtlich sein werden.
- Mindesthöhe über dem Boden: Vegetationspunkte, die unter diesem Wert liegen, werden ignoriert. Dies hilft, das Unterholz von den Bäumen zu unterscheiden.
- Schwellenwert für mittlere Vegetation: Bäume, deren Höhe zwischen diesem Wert und dem Wert für die maximale Vegetation liegt, werden als mittlere Klassifizierung eingestuft. Bäume unterhalb dieses Wertes werden als niedrige Vegetation eingestuft.
- Schwellenwert für die maximale Vegetation: Bäume, die höher als dieser Wert sind, werden als hohe Vegetation eingestuft.
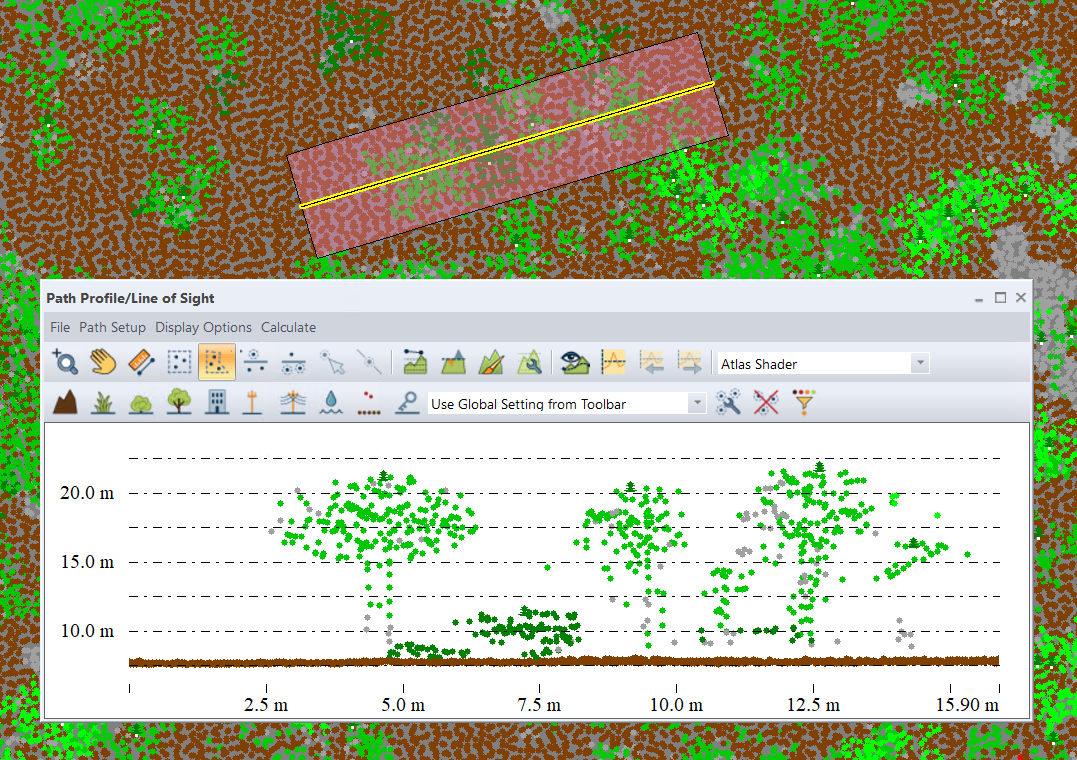
Diese aneinandergrenzenden Bestände wurden automatisch in verschiedene Klassen eingeteilt, die sich durch die Höhe der Bäume und die unterschiedlichen Grüntöne unterscheiden.
Vegetation Extraktion
Das Werkzeug zur Element-Extraktion erstellt Vektorelemente aus klassifizierten Punkten. Hier kann der Baumbestand zur einfachen Ansicht und zum Export erstellt werden. Für Bäume erzeugt das Werkzeug Vegetationsextraktion:
- Ein Vektorpunktelement, das sich an der Spitze jedes erkannten Baumes befindet
- Ein Flächenelement zur Umrandung jeder Baumkrone
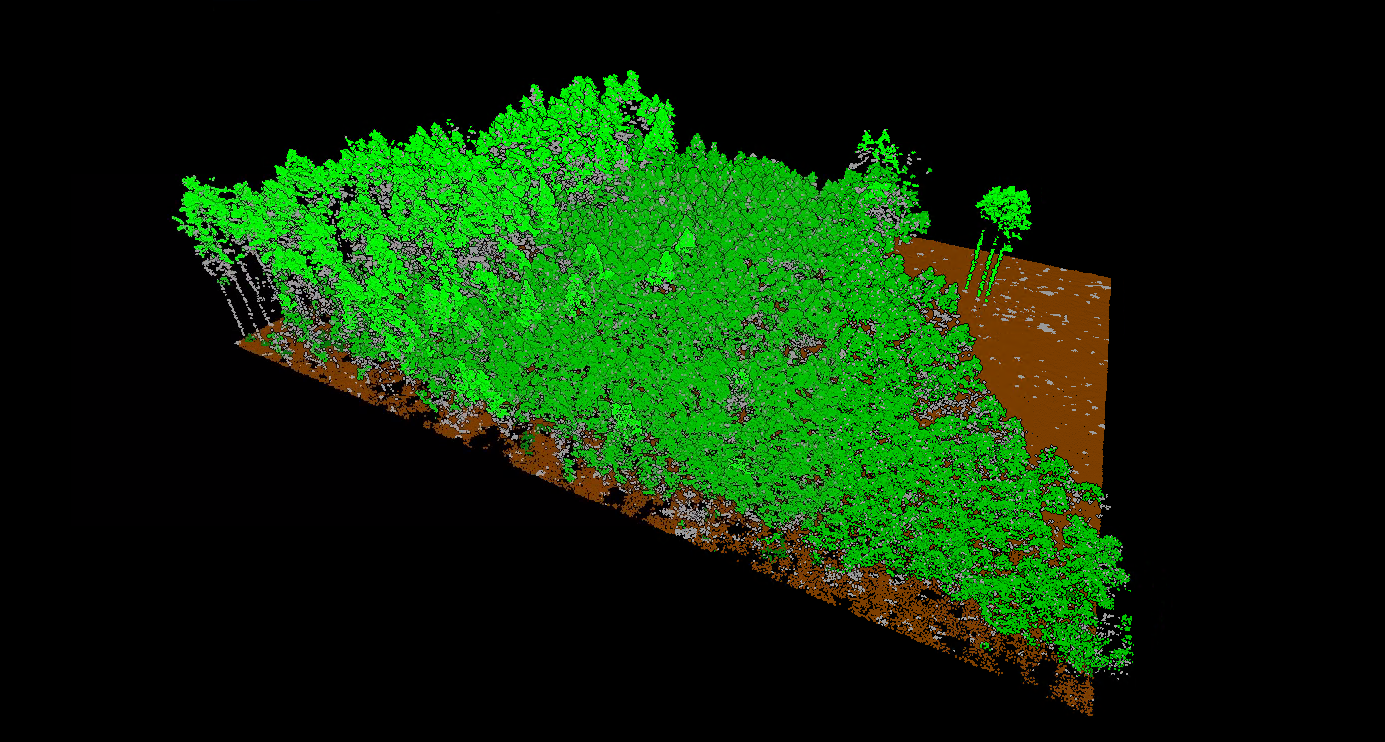
- Eine aus den segmentierten Punkten erzeugte 3D-Netzebene
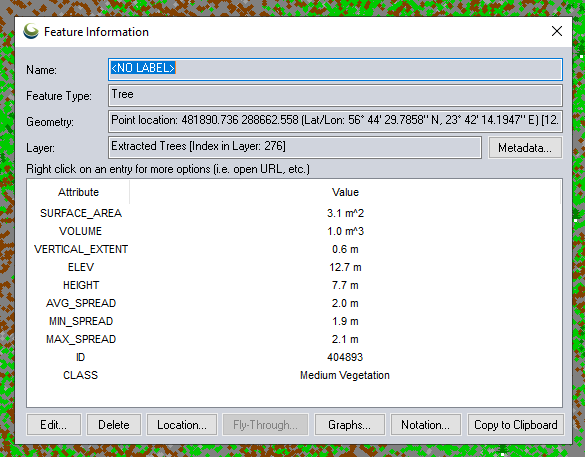
In der Mitte jedes Segments wird ein Baumpunkt erstellt, der die gemessenen Attribute des Baums enthält, z. B. Höhe, Kronenausdehnung und Klassifizierung. Um die Anzahl der Elemente zu sehen, sehen Sie sich die Ebene "Extrahierte Bäume" im Kontrollzentrum an oder öffnen Sie die Attributtabelle, um die Anzahl der Elemente in der unteren rechten Ecke zu sehen.
Diese Punktebene kann in viele verschiedene Dateitypen exportiert werden, einschließlich CSV und als GMMP, das mit Global Mapper Mobile kompatibel ist, um es vor Ort anzuzeigen und zu bearbeiten.
Andere Blogs über forstwirtschaftliche Arbeitsabläufe in Global Mapper Pro:
Messung der Baumhöhe mit Lidar
Erstellen von Kronendach-Höhenmodellen aus Lidar in Global Mapper Pro
Identifizierung von Änderungen der Baumhöhe durch Vergleich von Punktwolken mit dem Gelände