
Verarbeitung modernster Lidar-Daten in Global Mapper Pro
Global Mapper Pro ist eine hochmoderne Lidar-Verarbeitungssoftware. Diese Software ist in der Lage, Punktwolken durch automatisierte, auf maschinellem Lernen basierende Methoden zu verarbeiten, und bietet darüber hinaus eine Vielzahl leistungsstarker manueller Werkzeuge.
Diese Werkzeuge sind in der Lage, so gut wie jede Art von Punktwolkendaten zu verarbeiten, unabhängig von der Erfassungsmethode. Global Mapper Pro kann eine Vielzahl von aussagekräftigen Informationen aus einer Punktwolke extrahieren, von der automatischen Klassifizierung und Elementen-Extraktion bis hin zu spezifischen Metriken wie Neigung, Vegetationsüberdeckung, Durchhang von Stromleitungen, Baumdichte und mehr.
Angesichts der ständig wachsenden Nachfrage nach 3D-Punktwolken kann die Möglichkeit, hochauflösende Daten mit hoher Geschwindigkeit per UAV zu erfassen, die Effizienz der Arbeitsabläufe in allen Branchen steigern, die räumliche Daten verwenden.
Die Kombination der Verarbeitungsleistung von Global Mapper Pro mit den von einem der neuen LiDARUSA-Scanner erfassten Daten ist ein klarer Weg zur erfolgreichen Datenerfassung und -verarbeitung.
LiDARUSA
LiDARUSA, ein führender Hersteller von kostengünstigen UAV- und mobilen Kartierungssystemen, der häufig mit Blue Marble Geographics zusammenarbeitet, hat einen neuen Scanner in sein UAV-Angebot integriert. Dieser Scanner ermöglicht, wie beschrieben, eine bessere Boden- und Vegetationsklassifizierung. Die Punktwolken-Werkzeuge von Global Mapper Pro verarbeiten neue Daten von hochmodernen Scannern wie diesem mit Leichtigkeit.
Überblick über die Spezifikationen des Scanners:
Mit mehr als 100 Scanlinien bei 10 Hz und einem Sichtfeld von mehr als 100 (h) mal 25 (v) Grad bietet dieser Scanner die höchste Datenrate für das Sichtfeld aller derzeit in einem UAV verwendeten Scanner. Dieses hochauflösende System ist eine ausgezeichnete Wahl für UAV-Scans, da es eine Flughöhe von 120 m bei einer Geschwindigkeit von 30 km/h und eine starke Intensitätserfassung problemlos bewältigt.
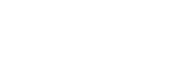
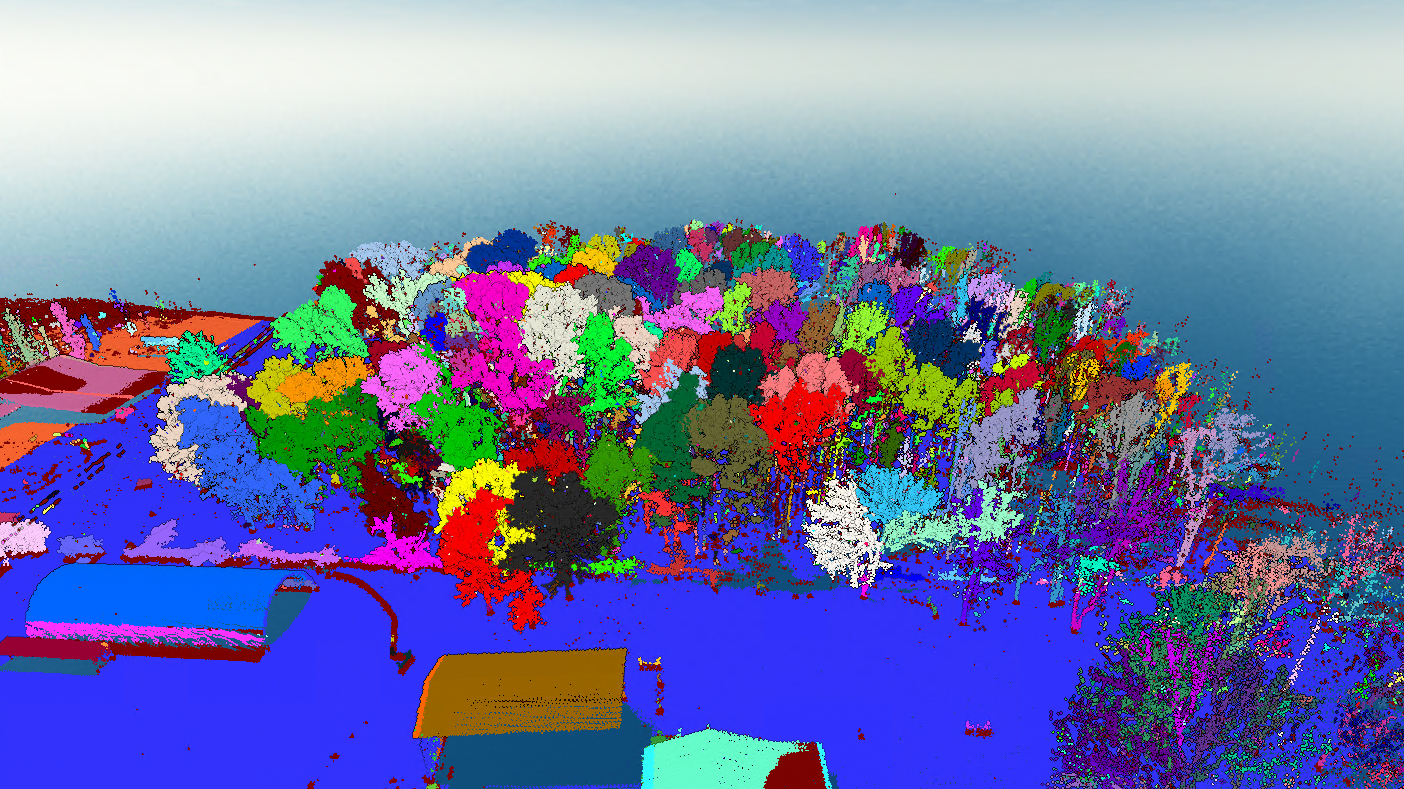
Das sind Daten, mit denen ein typischer Benutzer nicht jeden Tag zu tun hat. Die im Bild gezeigte Färbung "Lidar nach Scanwinkel" der Pujktwolke zeigt, dass alle diese Daten in einem Durchgang erfasst wurden. Punkte, die sich direkt unter der Flugbahn befinden, sind blau schattiert, während Punkte, die in einem Winkel erfasst wurden, mit entsprechenden Farben dargestellt werden.
Diese schnellen und hochfliegenden Drohnen konnten detaillierte Strukturen wie Stromleitungen und einzelne Baumäste erfassen. Diese detaillierten Darstellungen sind für eine genaue Analyse der Infrastruktur und der Landschaft von Bedeutung.
Lidar-Daten durch Klassifizierung mit Bedeutung füllen
Die manuelle Ableitung von Informationen aus Datensätzen ist eine mühsame Aufgabe, die durch die Anwendung einer Klassifizierung vereinfacht werden kann. Die Differenzierung von Punkten durch Klassifizierungen verleiht den Daten eine strukturelle Bedeutung. Global Mapper bietet seit Jahren eine Reihe integrierter automatischer Klassifizierungswerkzeuge zur Identifizierung von Punkten mit Boden, Vegetation, Gebäuden, Masten und Leitungen. Mit der zusätzlichen Segmentierung und der benutzerdefinierten Klassifizierung von Punktwolken wurde dieses Werkzeug-Set unendlich dynamischer gestaltet.
In diesem Abschnitt wird gezeigt, wie das Punktklassifizierungs-Toolset von Global Mapper Pro diese einzigartigen, per UAV gesammelten Lidar-Daten problemlos verarbeiten kann.
Werkzeuge zur automatischen Klassifizierung: Eingebaute Optionen für Standard-Elemente
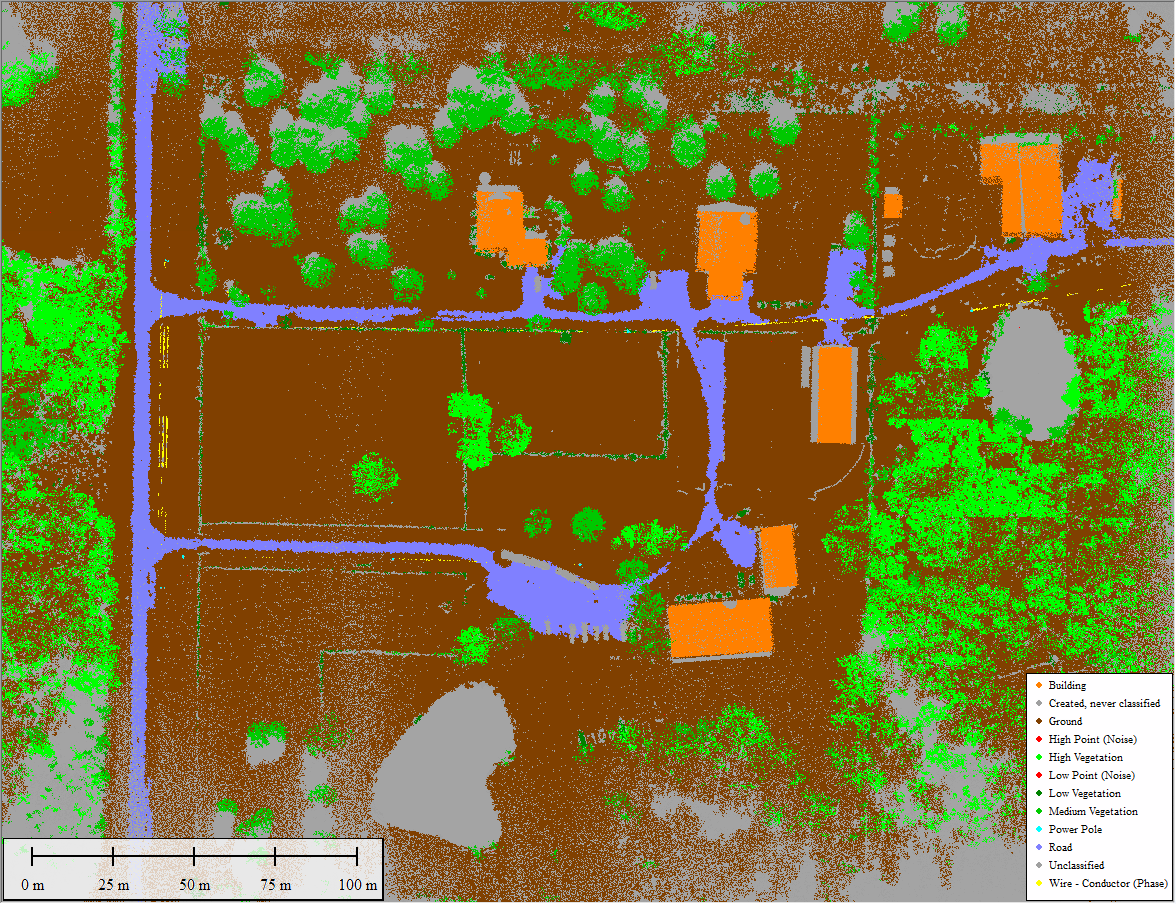
Das Werkzeug Automatische Punktwolkenanalyse kann zur einfachen Identifizierung von Ziel-Elementen innerhalb der Punktwolke verwendet werden. Diese integrierten Optionen decken die am häufigsten klassifizierten Merkmale ab, darunter Boden, Gebäude, verschiedene Vegetationsebenen, Stromleitungen und Masten.
Für unterschiedliche Punktwolkenstrukturen und Elementstypen stehen verschiedene Klassifizierungsmethoden zur Verfügung. Global Mapper Pro verfügt über eine Klassifizierungsmethode, die speziell für hochauflösende Punktwolken entwickelt wurde, die mit Drohnen, terrestrischen Scannern und mehr erfasst wurden. Die Max-Likelihood-Methode, eine maschinelle Lernmethode, wurde für hochauflösende und terrestrische Punktwolken entwickelt. Max Likelihood ist eine segmentierungsbasierte Methode. Für jeden Klassifizierungstyp wurde das Werkzeug so zugeschnitten, dass es Cluster von Punkten mit den gemeinsamen Formen und Eigenschaften dieser Elemente in der Punktwolke findet.
Global Mapper Pro bietet auch Optionen für die Segmentierung und benutzerdefinierte Klassifizierungsmethoden, um andere, weniger standardmäßige Objekte in der Punktwolke zu identifizieren.
Segmentierung: Punktcluster auf der Grundlage von Attributen und Formmustern isolieren
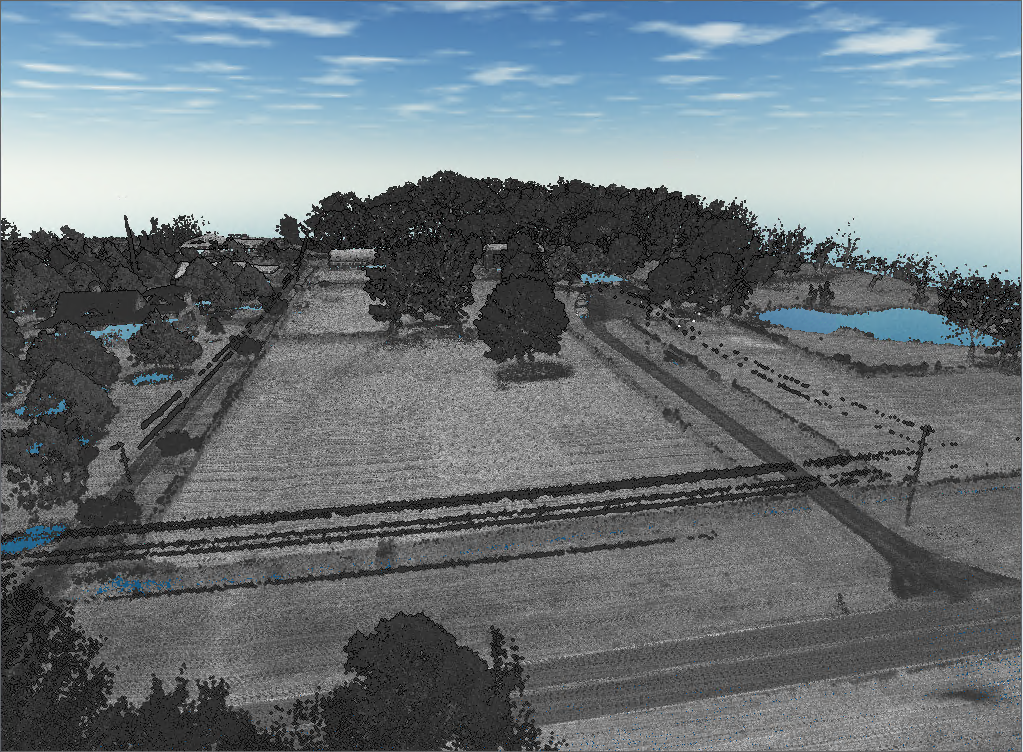
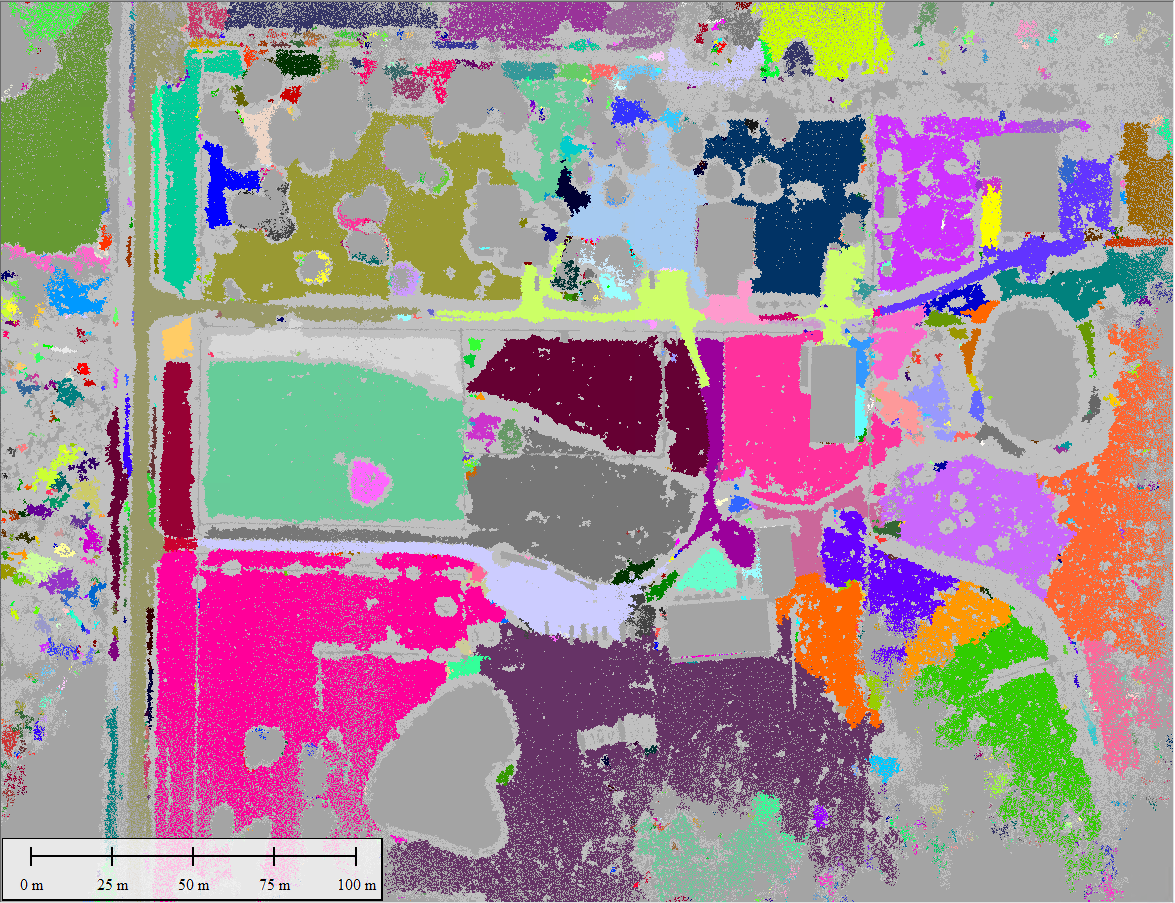
Anhand von Charakteristika in der Punktwolke konnte das Segmentierungs-Werkzeug einzelne Baumelemente innerhalb des Waldes identifizieren.
Bei der Segmentierung handelt es sich um eine Lidar-Klassifizierungsmethode, bei der Punkte auf der Grundlage gemeinsamer Attribute zu Gruppen oder "Clustern" zusammengefasst werden. Ihr Ziel ist es, "Dinge, die Dinge sind" zu gruppieren; zum Beispiel ist ein Auto ein Ding, ein Baum ist ein Ding, die Farbstreifen auf einer Straße, der Bürgersteig oder eine bestimmte Grasart.
So gut wie alles, was einen anderen "Fingerabdruck" von Attributen als seine Nachbarn hat, kann mit dem Segmentierungswerkzeug klassifiziert werden. Im obigen Bild hat das Segmentierungswerkzeug Punktcluster getrennt, die einzelne Bäume darstellen. Dies ist vergleichbar mit der Max-Likelihood-Methode bei der automatischen Klassifizierung zur Identifizierung von Vegetation, nur dass hier keine voreingestellten Variablen verwendet werden.
Die Segmentierung ist auch der "inoffizielle" erste Schritt beim Training eines benutzerdefinierten Klassifizierungswerkzeugs.
Individuelle Klassifizierung durch maschinelles Lernen

Wischen Sie, um zu sehen, wie diese Punktwolke segmentiert wurde, um Straßenpunkte zu gruppieren (Bilder oben), die dann mit dem benutzerdefinierten Klassifizierungstool klassifiziert wurden (Lila; Bilder unten).
Wenn es um die Erfassung von Strukturen und Nischenobjekten für branchenspezifische Szenarien geht, reichen automatische Klassifizierungswerkzeuge möglicherweise nicht aus. In solchen Fällen können Techniken des maschinellen Lernens angewendet werden, um automatisch einzigartige Elemente zu erstellen, die nicht Teil des Standardelementsatzes sind. Das preisgekrönte (vgl. hier) Benutzerdefinierte Klassifizierungs-Trainingswerkzeug von Global Mapper Pro ermöglicht die Erstellung von benutzerdefinierten Klassifizierungen, mit denen Zielelemente innerhalb einer Punktwolke automatisch identifiziert werden können.
Wie funktioniert die benutzerdefinierte Klassifizierung?
Die benutzerdefinierte Klassifizierung verwendet dieselbe auf maschinellem Lernen basierende Segmentierungsanalyse wie die integrierten Max-Likelihood-Klassifizierungen, um die Elemente der Punktwolke zu bewerten und Gemeinsamkeiten zwischen den Punkten zu finden, aus denen ein Objekt besteht. So könnten beispielsweise die in der obigen Punktwolke klassifizierten Straßenpunkte anhand ihrer Nachbarpunkte auf der Grundlage von Intensitätswerten und Krümmung unterschieden werden.
Diese Methode basiert auf der Annahme, dass jedes Objekt in der Punktwolke, jede Gruppe von Punkten, die mit der Segmentierungsanalyse identifiziert wurde, eine Signatur hat, die aus Attributen und/oder Strukturen besteht, die es von seinen Nachbarn unterscheidet. Das Werkzeug zur benutzerdefinierten Klassifizierung von Punktwolken macht sich diese Signaturen zunutze, um spezifische und einzigartige Elemente in einer Punktwolke zu klassifizieren. Beim Training der Klassifizierung hilft die Auswahl von Punkten nach Segmenten, um sicherzustellen, dass alle Punkte ähnliche Signaturen aufweisen. Einmal erstellt, kann diese benutzerdefinierte Klassifizierung auf andere Punktwolken angewendet werden.
Weiterführende Beiträge auf dieser Seite:
Trainieren einer benutzerdefinierten Punktwolkenklassifizierung in Global Mapper Pro
Einsatz von maschinellem Lernen zur Klassifizierung der Brückeninfrastruktur in Punktwolkendaten
Manuelle Klassifizierung: Feinabstimmung und Bereinigung von Lidar-Daten
Sie haben ein paar Punkte, die Sie gerne bereinigen möchten? Unter der Vielzahl von Klassifizierungsmethoden in Global Mapper Pro bieten die manuellen Klassifizierungsoptionen einfache und dynamische Methoden zur manuellen Bearbeitung von Punktwolken.
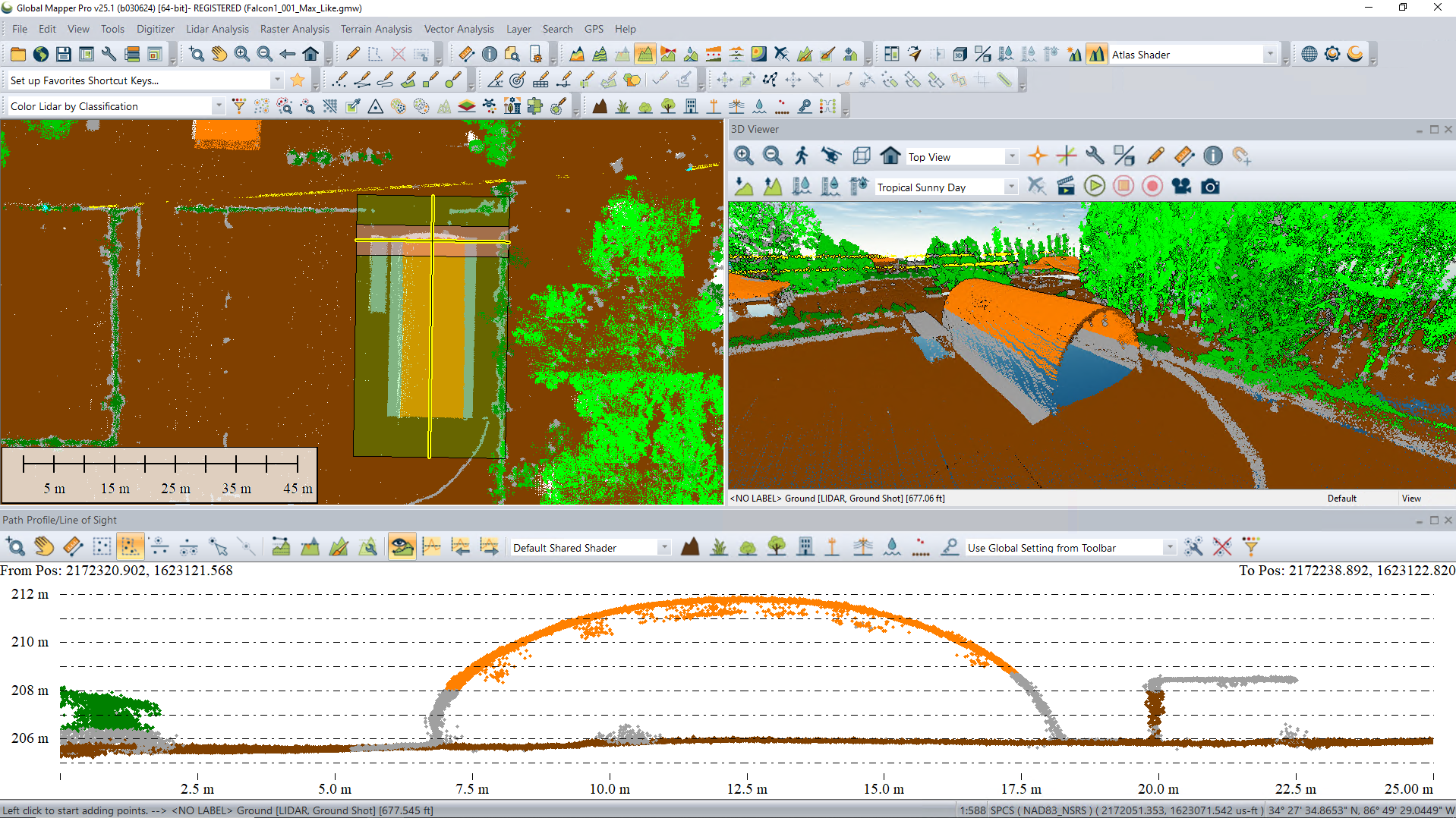
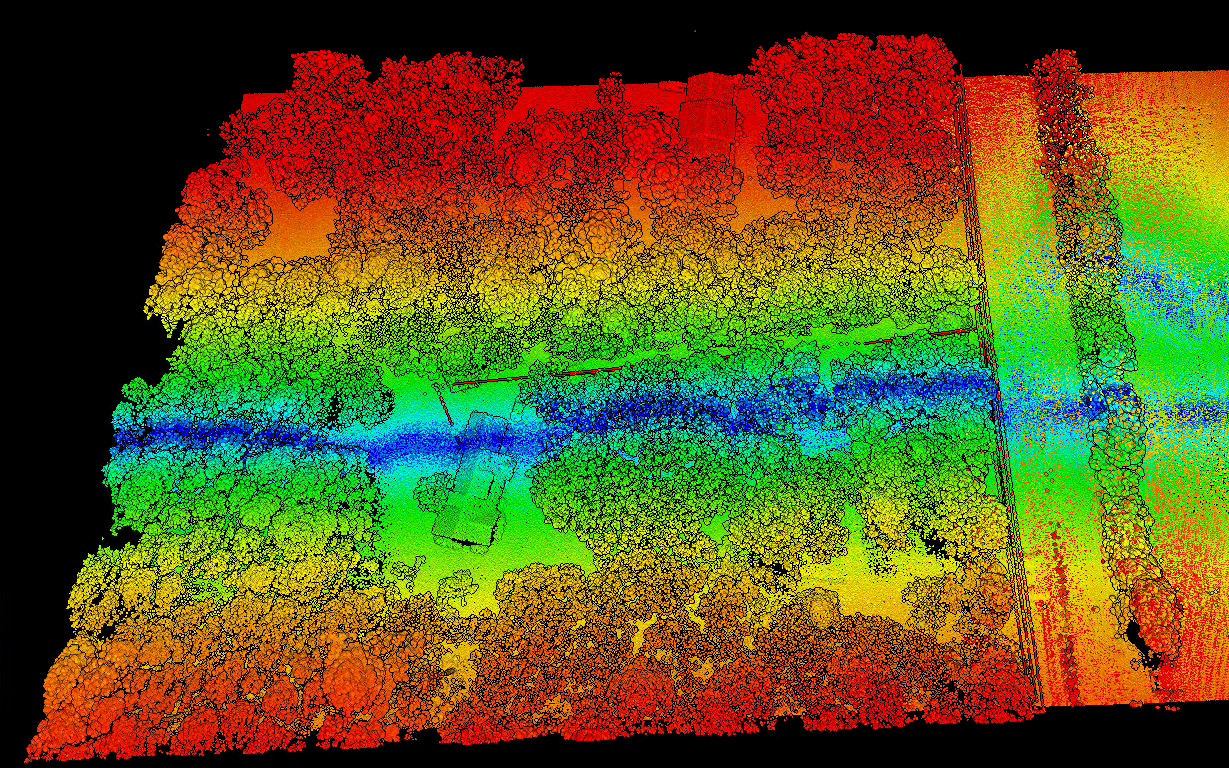
Die Kanten einer Scheune, die rund genug waren, um von den traditionellen Gebäudeklassifizierungsmethoden ausgeschlossen zu werden, konnten mit dem Pfad-Profil-Fenster leicht ausgewählt und klassifiziert werden.
Punktklassifizierungen können manuell aktualisiert werden, indem die gewünschten Punkte ausgewählt und eine vorkonfigurierte oder benutzerdefinierte Klassifizierung angewendet wird. Mit dem Pfadprofil-Werkzeug und dem 3D-Viewer ist es einfach, komplexe Strukturen in einer Punktwolke zu analysieren und nur die Punkte auszuwählen, die bearbeitet werden müssen. Insbesondere das Pfadprofil-Werkzeug ermöglicht es Ihnen, die Daten aus senkrechten und parallelen Perspektiven zu betrachten und zu bearbeiten. Diese Datensegmente bieten die nötige Finesse für die Erstellung hochpräziser Klassifizierungszuweisungen.
Anwendungsbeispiel: Lokalisierung von Bereichen, in denen die Vegetation in die Stromleitung ragt
Korridorinspektionen können am Boden oder durch Überfliegen des Korridors durchgeführt werden, um Vegetation zu untersuchen, die in bestimmte Bereiche hineinragt.
Stellen Sie sich vor, Sie könnten Ihre Stromleitungen mit einer Geschwindigkeit von 30 km/h vermessen und dann automatisch Bereiche markieren, in die die Vegetation hineinragt. Global Mapper bietet eine benutzerfreundliche Lösung zur Identifizierung möglicher Vegetationsübergriffe, bevor die Pflanzenwelt mit den Versorgungseinrichtungen in Kontakt kommt. Durch die Verwendung von Lidar-Daten, die die Vegetation durchdringen können, ist es möglich, potenzielle Gefahren zu erkennen, bevor man sich für eine Bodeninspektion ins Gelände begibt.
Extrahieren von Vektorelementen: Stromleitungen
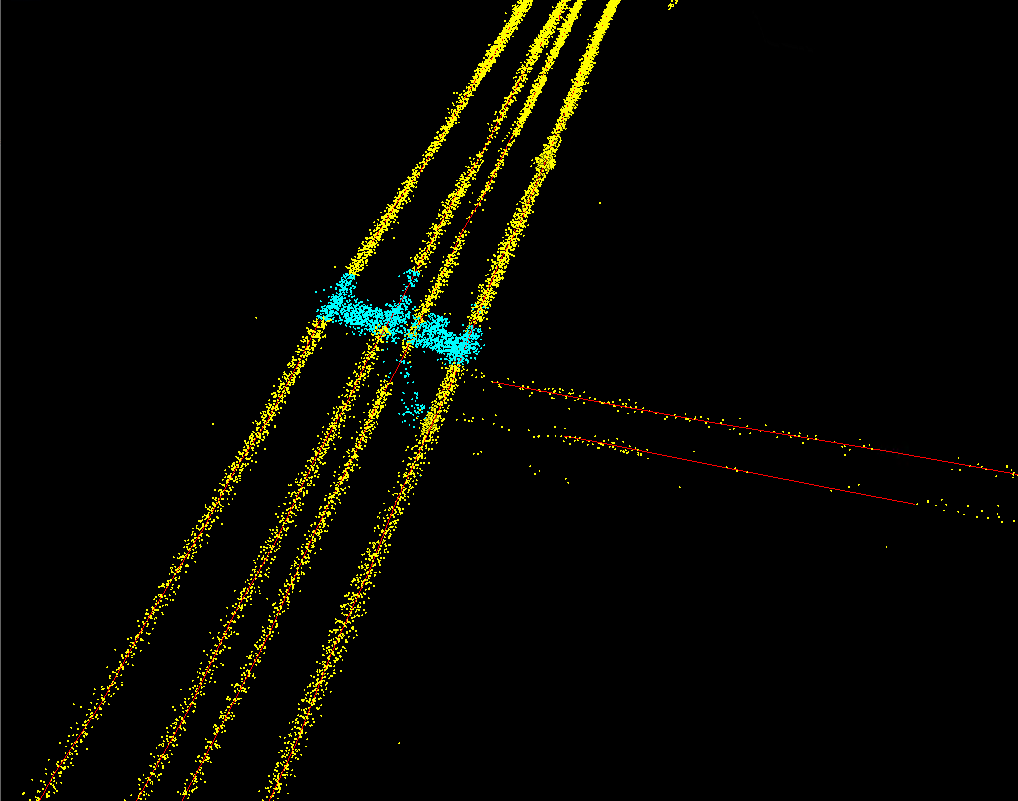
Ein Arbeitsablauf, der häufig mit hochauflösenden, per Drohne/UAV erfassten Daten durchgeführt wird, ist die Kartierung von Stromleitungen. Nachdem die Stromleitungspunkte mit dem automatischen Klassifizierungswerkzeug klassifiziert wurden, können sie als Vektorlinienmerkmale extrahiert werden. Diese Linienelemente erben die Attributinformationen aus der Punktwolke, wie z. B. die Höhe.
Punkte, die Stromleitungsmerkmale (Gelb) darstellen, wurden in 3D-Vektorlinienelemente (Rot) extrahiert. Um die Leitungen durch die dichte Vegetation zu führen, war eine manuelle Bearbeitung erforderlich, die jedoch mit dem Pfadprofil-Werkzeug und dem 3D-Viewer problemlos möglich war. Diese Linienmerkmale sind nützlich für eine 3D-Kartierung, die Weitergabe an andere Software, die 3D-Daten nicht so gut verarbeiten kann wie Global Mapper, oder für das Messen von Eingriffen.
Identifizierung von Gebieten, in die die Vegetation hineinragt
Mit der Möglichkeit, Daten mit hoher Geschwindigkeit zu erfassen, wie es LiDARUSA mit diesem Datensatz gezeigt hat, ist es einfacher geworden, diese Eingriffe für Inspektionen zu identifizieren.
Nach dem Extrahieren der Stromleitungen werden die potenziellen Überschneidungen mit dem Werkzeug Lidar nach Entfernung auswählen hervorgehoben. Als Ergebnis werden die Vegetationspunkte ausgewählt, die innerhalb einer bestimmten Entfernung von der extrahierten Stromleitung liegen. Im folgenden Beispiel haben wir einen maximalen Suchabstand von 2 m gewählt, um auf beiden Seiten der Stromleitungen zu suchen.
Dieses Werkzeug funktioniert sowohl auf Geländeebenen als auch auf Vektorebenen und kann nach jeder Art von Lidar-Punkten suchen. In diesem Fall wurde die Punktwolke auf die Vegetation gefiltert, da wir uns in erster Linie mit der Beeinträchtigung durch Bäume befassen.

Vegetationspunkte innerhalb von 2 m um die Stromleitungen wurden automatisch erkannt und hervorgehoben, wie in den 2D- und 3D-Ansichten gezeigt.
Diese Eingriffsbereiche können auch in Global Mapper Mobile angezeigt werden, einer vereinfachten Version der Desktop-Anwendung für iOS- und Android-Geräte, die Wartungsteams oder anderen Mitarbeitern vor Ort einen einfachen Zugriff ermöglicht. Für jede Punktgruppe kann ein Vektor-Begrenzungsrahmen erstellt werden, um die Lage und Größe jedes Eingriffs abzugrenzen. Nach dem Export mit allen anderen gewünschten Daten kann jedes Team den Arbeitsbereich von einem iOS- oder Android-Handgerät aus aktualisieren, um abgeschlossene Bereiche zu markieren, und die Daten an das Büro zurücksenden, um den Projektfortschritt zu überwachen.