
Punktwolken-Segmentierung in Global Mapper Pro
Mit der Veröffentlichung von Global Mapper Pro entwickelt Blue Marble Geographics die Werkzeuge zur Analyse von Punktwolken im Programm weiter. Eine der jüngsten Ergänzungen der Global Mapper-Punktwolkenverarbeitungswerkzeuge ist ein Werkzeug zur Segmentierung durch Spektralkurvenpartitionierung, mit dem eindeutige Punktsegmente auf der Grundlage der vom Benutzer eingegebenen Parameter identifiziert werden können. Diese neue Funktionalität fällt unter den Begriff der automatischen Klassifizierung und kann für eine halbautomatische Klassifizierung verwendet werden. Aber anstatt direkt eine Klasse auf die analysierten Punkte anzuwenden, wendet das Segmentierungswerkzeug einen Segmentidentifikationswert auf jedes identifizierte Cluster von Returns an.
Was ist Punktwolken-Segmentierung?
Das Segmentierungswerkzeug in Global Mapper Pro verwendet Punkt-zu-Punkt-Ähnlichkeitsmaße, um eindeutige Punktcluster zu identifizieren und zu kennzeichnen. Die Merkmale jeder Punktrückgabe, die in der Analyse verwendet werden, hängen von den verfügbaren Punktattributen und den vom Benutzer eingegebenen Parametern ab. Auf der Grundlage der Ähnlichkeit zwischen den Punkten unterteilt das Werkzeug die Punkte in einzelne Segmente.
Bewertung von Attributen
Als erster Schritt der Segmentierungsanalyse wird eine Attributbewertung durchgeführt, um die Punkt-zu-Punkt-Ähnlichkeit zu bestimmen. Um diesen Abschnitt der Analyse anzupassen, können die Benutzer die Attributwerte auswählen und gewichten, die bei diesem Prozess berücksichtigt werden.
Position - Die Koordinatenposition der zurückgegebenen Punkte wird bei dieser Analyse immer berücksichtigt. Durch die Berücksichtigung der Position wird sichergestellt, dass die identifizierten Punktsegmente zusammenhängend sind und ein einzelnes Element oder zusammenhängende Elemente darstellen. Ohne Berücksichtigung der Position könnten ähnliche Punkte, die in der Punktwolke verstreut sind, im selben Segment platziert werden, was keine aussagekräftige Merkmalsidentifikation ermöglicht.
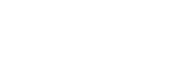
Normale - Eine Punktnormale ist die Richtung, die senkrecht auf der Oberfläche steht, die der Punkt darstellt. Zur Veranschaulichung dieses Konzepts stellen Sie sich eine kleine Nachbarschaft von Punkten und die Oberfläche vor, die sie repräsentieren. Stellen Sie sich dann an einem einzelnen Punkt die Punktnormale als eine senkrechte Linie vor, die von der erstellten Oberfläche ausgeht. Die Berücksichtigung des Wertes der Punktnormalen in der Ähnlichkeitsanalyse hilft bei der Identifizierung von flachen Oberflächen.
Wenn Sie Dachebenen oder die Bodenoberfläche identifizieren wollen, werden Sie wahrscheinlich bessere Ergebnisse erzielen, wenn Sie die Punktnormalwerte bei der Attributbewertung stärker berücksichtigen.
Die Darstellung der Oberfläche, die die Punkte erzeugen, und eine Punktnormale werden in eine Querschnittsansicht eines Daches eingezeichnet.
Intensität - Die Intensität ist die Stärke des Laserimpulses, der bei der Erfassung von Lidar-Daten zum Sensor zurückkehrt. Die Stärke des Rücklaufs wird von der Oberfläche beeinflusst, die den Laserimpuls reflektiert. Die Intensitätswerte einer Punktwolke können in Global Mapper Pro mit dem Zeichenmodus Lidar nach Intensität färben visualisiert werden. Die Berücksichtigung der Intensität bei der Segmentierungsanalyse hilft bei der Bildung von Punktclustern, die mit größerer Wahrscheinlichkeit aus demselben oder einem ähnlichen Material bestehen.
Return-Nummer - Wenn ein Laserpuls an einen Lidar-Sensor gesendet und wieder zurückgeschickt wird, kann sich der Puls aufspalten und mehrfach zurücklaufen, wodurch mehrere Returns entstehen. Diese Informationen werden zusammen mit den Daten als Attribut "Return-Nmmer" gespeichert. Feste Oberflächen wie der Boden oder Gebäude bestehen eher aus einzelnen Returns, während Bäume eine Struktur haben, die es dem Impuls erlaubt, von Ästen und Blättern abzuprallen, wodurch mehrere Returns entstehen. Wie die Intensität kann auch die Anzahl der Returns in Global Mapper Pro mit den Optionen des Lidar-Zeichenmodus visualisiert werden.
Krümmung - Die Krümmung bezieht sich auf die von einer lokalen Nachbarschaft von Punkten erzeugte Kurve, ähnlich wie die Punktnormalwerte die von den Punkten erzeugte Form berücksichtigen. Die Einbeziehung der Krümmung in die Attributbewertung berücksichtigt die Konsistenz der Form.
Zwar stehen nicht alle diese Attribute für alle Punktwolken zur Verfügung, z. B. haben von Fotos abgeleitete Punktwolken in der Regel keine Return-Nummer oder Intensität, aber die Einstellungen für die Segmentierungsanalyse ermöglichen dem Benutzer die Auswahl und Gewichtung der zu berücksichtigenden Merkmale.
Segmentierung
Nach der Analyse der Punktähnlichkeit unterteilt Global Mapper Pro die Punkte in ihre Cluster oder Segmente auf der Grundlage der ermittelten Ähnlichkeit und der vom Benutzer eingegebenen Partitionierungswerte. Bei einigen der Segmentierungsparameter handelt es sich um einheitenlose und abstraktere Werte, als Global Mapper-Benutzer vielleicht kennen.
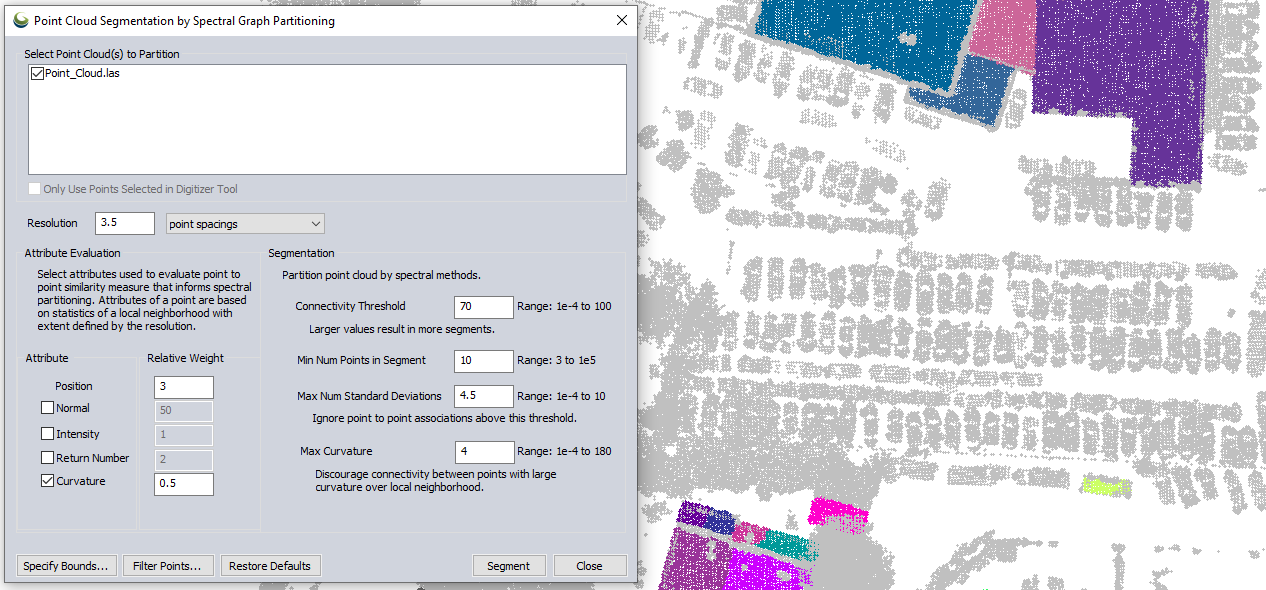
Konnektivitätsschwelle - Der Konnektivitätswert ist ein Schwellenwert für die algebraische Konnektivität, der zur Messung der Verbindungen zwischen Punkten und zur Aufteilung der Daten in Segmente verwendet wird. Insgesamt führt ein größerer Wert zu mehr Segmenten, wobei kleinere Änderungen der Ähnlichkeit zur Aufteilung der Daten verwendet werden, und ein kleinerer Wert führt zu weniger Segmenten.
Mindestanzahl von Punkten im Segment - Der Wert für die Mindestanzahl von Punkten legt die Größe des kleinsten zulässigen Segments in Punkten fest. Berücksichtigen Sie bei der Einstellung dieses Parameters die Dichte der Punktwolke und die Elemente, die Sie identifizieren möchten, um abzuschätzen, wie viele Punkte ein bestimmtes Element darstellen.
Maximale Anzahl der Standardabweichungen - Die Standardabweichung ist ein gängiges Maß in der statistischen Analyse und misst die Streuung der Werte vom Mittelwert. Die Festlegung der maximalen Anzahl von Standardabweichungen für die Segmentierung engt den Bereich der zu berücksichtigenden Punktverbindungen ein. Eine größere Anzahl von Standardabweichungen erzeugt Segmente, die mehr schwach verbundene Punkte enthalten, während eine kleinere Anzahl Segmente mit enger verbundenen Punkten erzeugt.
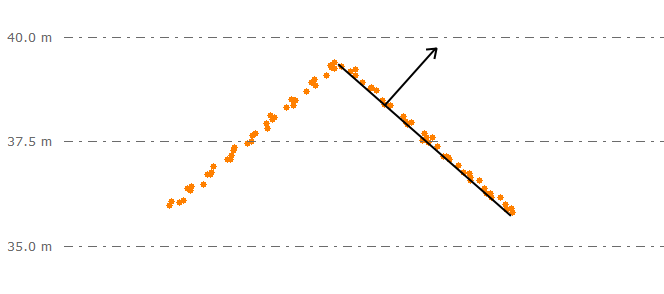
Maximale Krümmung - Die maximale Krümmung legt den zulässigen Krümmungsgrad innerhalb eines einzelnen Segments fest. Wenn dieser Wert überschritten wird, wird das Segment in mehrere Segmente aufgeteilt.
Die Punkte, die ein Auto repräsentieren, werden in zwei Segmente aufgeteilt, wobei die Unterbrechung zwischen ihnen dort erfolgt, wo die Kurve am extremsten ist. Ein höherer Krümmungsschwellenwert kann helfen
Wie kann die Segmentierungsanalyse eingesetzt werden?
Die Segmentierungsanalyse von Punktwolken in Global Mapper kann ein unglaublich vielseitiges Werkzeug sein. Da nach der Ausführung dieses Werkzeuges keine Klassifizierung auf Punkte angewendet wird, können Sie damit Elemente ohne explizite Klassen identifizieren und/oder die Elemente klassifizieren, nachdem Sie sie durch Segmentierung identifiziert haben.
Identifizierung des Bodens
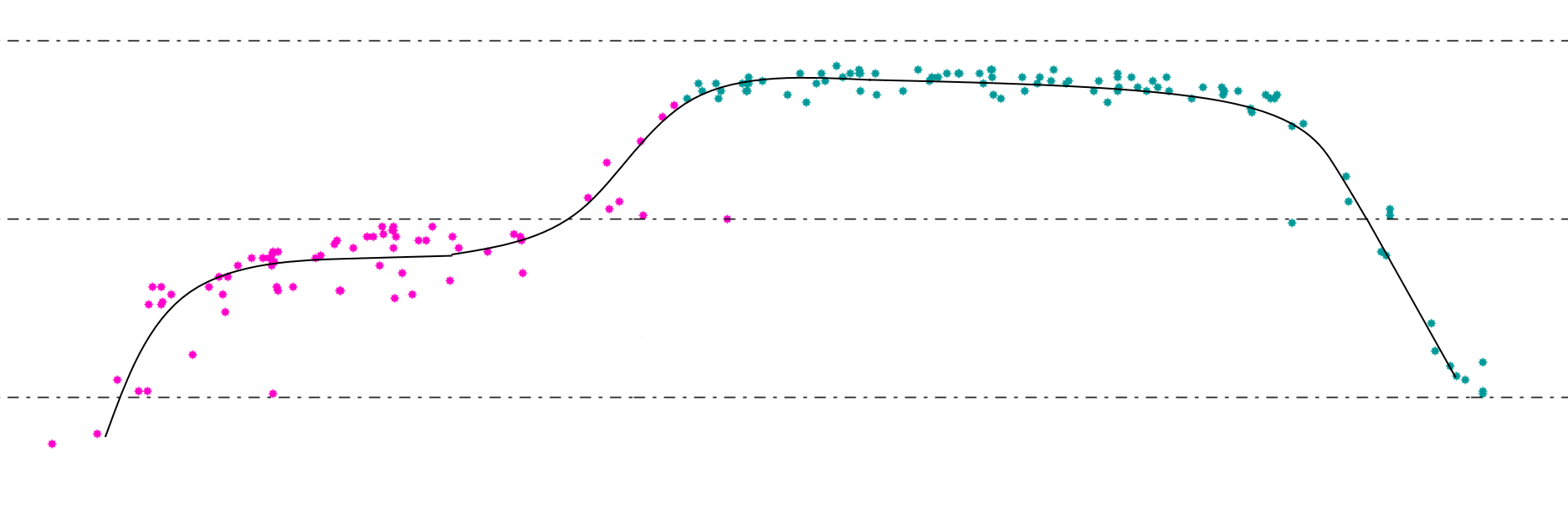
Die Verwendung der Segmentierung zur Identifizierung von Bodenpunkten kann über die automatischen Klassifizierungswerkzeuge hinausgehen, da mehr Attribute berücksichtigt werden können. Zur Identifizierung des Bodens in dieser Punktwolke wird das Segmentierungswerkzeug verwendet, und es werden Positions-, Intensitäts- und Krümmungswerte berücksichtigt. Nach dem Ausführen des Segmentierungswerkzeugs bleibt das Dialogfeld geöffnet, und der Lidar-Zeichenmodus wechselt automatisch zu Lidar nach Segment-ID zeichnen. Bei diesem Vorgang wird die Punktwolke anhand der neu erstellten und angewandten Segment-ID-Werte angezeigt.
Bei vielseitigen Anwendungen kann die Segmentierung dazu verwendet werden, große oder kleine Elemente in einer Punktwolke zu identifizieren.
Unter Verwendung von Einstellungen, die einige wenige Punktattribute berücksichtigen und Segmente mit vielen Punkten (150 oder mehr) erstellen, die in hohem Maße miteinander verbunden sind, werden mit einem niedrigen Schwellenwert für die Konnektivität Segmente für Boden und große Flachdächer identifiziert.
Um die identifizierten Punktsegmente als Boden zu klassifizieren, können diese Punkte mit dem Werkzeug Lidar-Segmente auswählen ausgewählt werden. Wählen Sie das erste Bodensegment aus, indem Sie auf einen beliebigen Punkt innerhalb des Segments klicken, und halten Sie dann die Strg-Taste gedrückt, um die Auswahl des zweiten Segments zu ermöglichen. Wenn die Punkte, die Boden darstellen, ausgewählt sind, können sie manuell als Boden klassifiziert werden.

Eine eindeutige Klassifizierung des Bodens wird erreicht, bevor man zur Identifizierung kleinerer Elemente übergeht.
Identifizierung von Autos
Nachdem nun ein großer Teil der Punkte identifiziert und als Boden klassifiziert wurde, können diese Punkte gefiltert und der Fokus auf kleinere Merkmale im Datensatz gelegt werden. In dieser speziellen Punktwolke gibt es einen Parkplatz mit Autos, und das Segmentierungswerkzeug in Global Mapper kann verwendet werden, um die Elemente der Autos zu identifizieren.
Vor der Ausführung des Segmentierungsprozesses zur Identifizierung von Fahrzeugen werden die am Boden klassifizierten Punkte herausgefiltert, damit sie bei der Analyse nicht berücksichtigt werden.
Die Verwendung des Werkzeugs Lidar-Daten filtern oder das Filtern von Punkten im Segmentierungsdialogfeld bedeutet, dass nur die nicht klassifizierten Punkte bei der Segmentierungsanalyse berücksichtigt werden. Die Berücksichtigung von Punktposition und -krümmung, die Verschärfung des Konnektivitätsschwellenwerts und die Änderung anderer Parameter führen zu identifizierten Segmenten, die die Fahrzeuge in dieser Punktwolke darstellen.
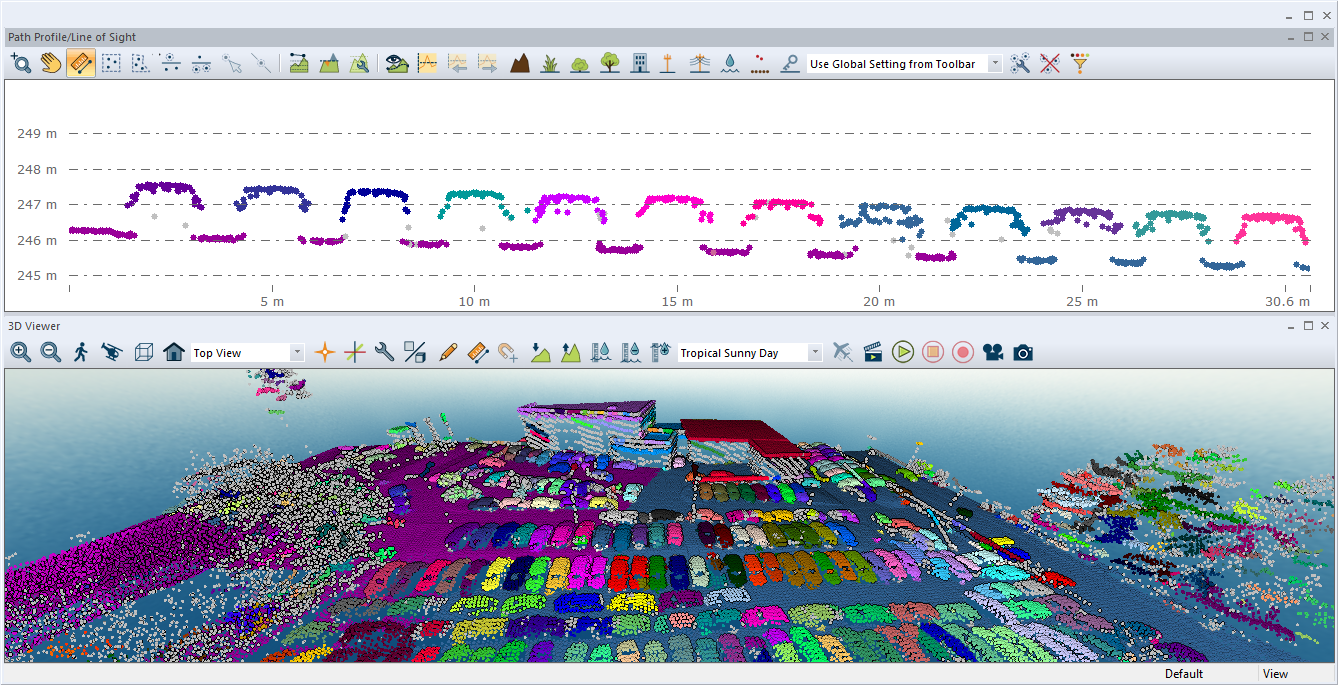
In der Pfadprofilansicht und in 3D sind die segmentierten Fahrzeuge deutlich zu erkennen.
Wenn die Punkte, die die Fahrzeuge repräsentieren, identifiziert sind, können sie mit dem Werkzeug "Segment auswählen" ausgewählt werden, um sie zu klassifizieren oder zu löschen.
Das Werkzeug zur Segmentierung von Punktwolken in Global Mapper bietet die Möglichkeit, die Identifizierung von Elementen anzupassen, um sie bei der Verarbeitung einer Punktwolke zu klassifizieren oder zu entfernen. In Kombination mit dem Werkzeug "Segment auswählen" erweitert die Segmentierung die Klassifizierungsmöglichkeiten des Programms und die Effizienz der manuellen Klassifizierung erheblich.
Wenn Sie die neue Punktwolken-Segmentierung in Global Mapper Pro ausprobieren möchten, laden Sie noch heute eine kostenlose 14-Tage-Testversion herunter! Wenn Sie Fragen haben, zögern Sie nicht, sich mit uns in Verbindung zu setzen.
Wenn Ihnen dieser Blog gefallen hat, finden Sie vielleicht auch diese anderen Ressourcen nützlich. Der Aufruf des Links führt Sie auf eine neue Seite und ruft YouTube auf (bitte beachten Sie ggfls. die dortigen Bestimmungen):